国境警備は非常に複雑な課題です。多くの国境線は森林、山岳、河川、そして人里離れた地形に広がっており、従来のフェンスやパトロールだけでは十分に対応できません。長大なコンクリート壁はコストが高く、柔軟性に欠け、効果も限定的です。
Read More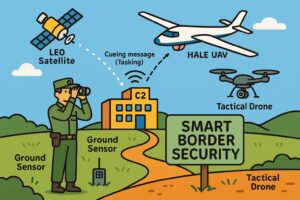
国境警備は非常に複雑な課題です。多くの国境線は森林、山岳、河川、そして人里離れた地形に広がっており、従来のフェンスやパトロールだけでは十分に対応できません。長大なコンクリート壁はコストが高く、柔軟性に欠け、効果も限定的です。
Read More
LM Studio をコーディング用途で使うとき、大事なのはモデルの選択だけではありません。実際には、top_p、top_k、repeat_penalty といった 生成パラメータの設定 が結果の正確さ・安定性・創造性に大きく影響します。
Read More
多くの工場やリサイクル事業者が抱えている共通の課題は、スクラップ管理(Scrap Management) です。 毎月、大量の金属・プラスチック・紙・電子機器などの廃材が集まり、回収・計量・支払いを待っています。しかし現在のスクラップ売却プロセスは煩雑で、電話対応に追われ、書類紛失や支払い遅延が頻発し、工場担当者やリサイクル業者にとって不透明な状態です。
Read More
新しいプロジェクトを始めるとき、つい機能リストから入ってしまいがちです。 「ログイン機能をつける」「ダッシュボードを作る」「決済をつなぐ」 でも、本当に大事なのは お客様が何をしたいのか です。
Read More
この2年間、人工知能(AI) はドットコム時代以来最大のテックブームを引き起こしました。NVIDIA、AMDなどの半導体企業は、各社が巨大なGPUクラスタをクラウド上に構築しようと競い合う中で株価が急騰しました。
Read More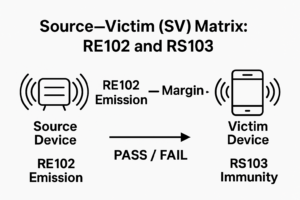
はじめに 電磁両立性(EMC)のテストは、単にラボで規格に合格することだけではありません。艦船や商船のように限られた空間に多数の通信機器、レーダー、航法システムが搭載されている環境では、システム同士が干渉せずに共存できるかが重要になります。
Read More
💔 信頼が失われるとき 人々がリーダーや制度に対する信頼を失うと、不満は街にあふれ、抗議や衝突、社会の分断へとつながります。 しかし人々が本当に求めているのは、複雑なものではありません。 正直さ、安全、機会、そして未来を形づくるための声です。
Read More
美容・エステ業界は急成長しています。しかし実際に多くの美容クリニックでは、いまだにこんな課題があります。 電話予約や紙のカレンダーによる管理 紙の同意書(Consent Form)がファイルに積み上がっている Before/After 写真がスタッフのスマホにバラバラに保存されている マーケティングは SNS 投稿やチラシに限定されている
Read More
EC市場が急速に拡大する中、顧客はよりスマートでパーソナライズされた購買体験を求めています。今回ご紹介するプロジェクトは、その期待に応えるために開発されました。画像認識、言語翻訳、クロスセル提案を組み合わせ、店舗と顧客をより強力につなぐことができます。
Read More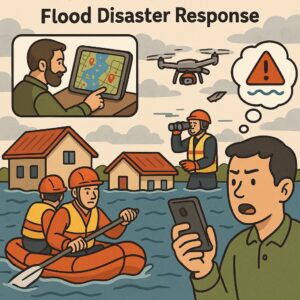
洪水が発生すると、一秒一秒が命に関わります。道路は水没し、通信網は途絶し、現場はすぐに混乱します。現場での救助活動をどう調整するかは非常に大きな課題です。ここで役立つのが TAK(Team Awareness Kit / Tactical Assault Kit) ― もともとは軍事用に開発された状況認識プラットフォームですが、現在では世界各地で災害対応に応用されています。
Read More
オンラインショッピングでは、欲しい商品を正確に言葉で表現するのは難しいことがあります。ですが、もし 写真をアップロードするだけで、すぐに似た商品を見つけられたらどうでしょうか?
Read More
はじめに: 現代プラットフォームに潜む課題 艦艇、航空機、先進的な通信システムでは、数多くのアンテナ、センサー、電子機器が並行して動作しています。これにより高い能力が実現される一方で、見えにくい課題が発生します。それが 電磁結合(electromagnetic coupling) です。
Read More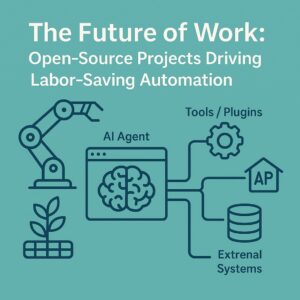
少子高齢化や人手不足、そして高騰する人件費。いま産業界では「どうやって効率よく仕事を進めるか」が大きな課題になっています。 そこで注目されているのが オープンソースの自動化プロジェクト。無料で利用・改良でき、世界中のコミュニティと一緒に進化していく仕組みは、農業から製造業、スマートホーム、そしてAIエージェントにまで広がっています。
Read More
世界の富裕層は、オンライン領域において依然として十分にサービスを受けていません。 Facebook や LinkedIn のような大衆向けプラットフォームは規模を追求する一方で、広告や雑音、浅い人脈に溢れています。 しかし、ハイネットワース個人(HNWI)や超富裕層(UHNWI)が本当に求めているのは、プライバシー、独占性、そして厳選された価値です。
Read More
Marcus du Sautoy著『Thinking Better: The Art of the Shortcut』からのインスピレーション
Read More
🚀 はじめに もしあなたの会社が デジタル従業員 を雇えるとしたらどうでしょうか? 開発者、アナリスト、ライター、サポート担当者——すべてがAIで動き、24時間働き、既存のシステムとシームレスに統合される。
Read More
✨ VS Code や Neovim でファイルを編集しながら、AIコメントを書くことでコードを即時生成・修正・説明!
Read More
こんにちは 👋 もしこんな風に思ったことがあるなら… 「コード、誰かに “ここ直して” って話すだけでできたら最高なのに…」
Read More
🔹 はじめに AIはソフトウェア開発の世界を大きく変えています。現在では Codex、GitHub Copilot、NeovimやVSCodeのAIプラグイン などのツールを使えば、関数の自動補完、ボイラープレートの生成、さらには難解なエラーメッセージの解説までしてくれます。
Read More
LLM(Large Language Model)の選択は、目的・ハードウェア・効率性の要件 によって変わります。 すべてのモデルが同じ用途向けではありません。あるものは チャットやアシスタント に、あるものは Mac(Apple Silicon)向け最適化 に、あるものは 軽量化(量子化) に、そしてあるものは セマンティック検索 に適しています。
Read More